

Робот собака на Arduino
Методы 3D-печати, используемые в этом материале
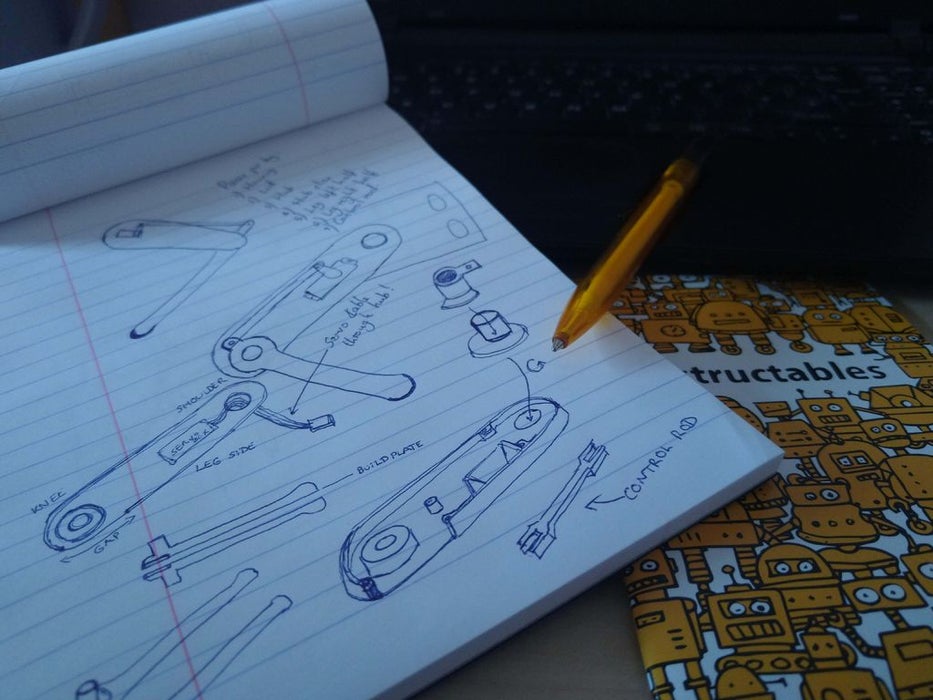
Для создания робота были использованы несколько уникальных техник, которые вы должны будете повторить.
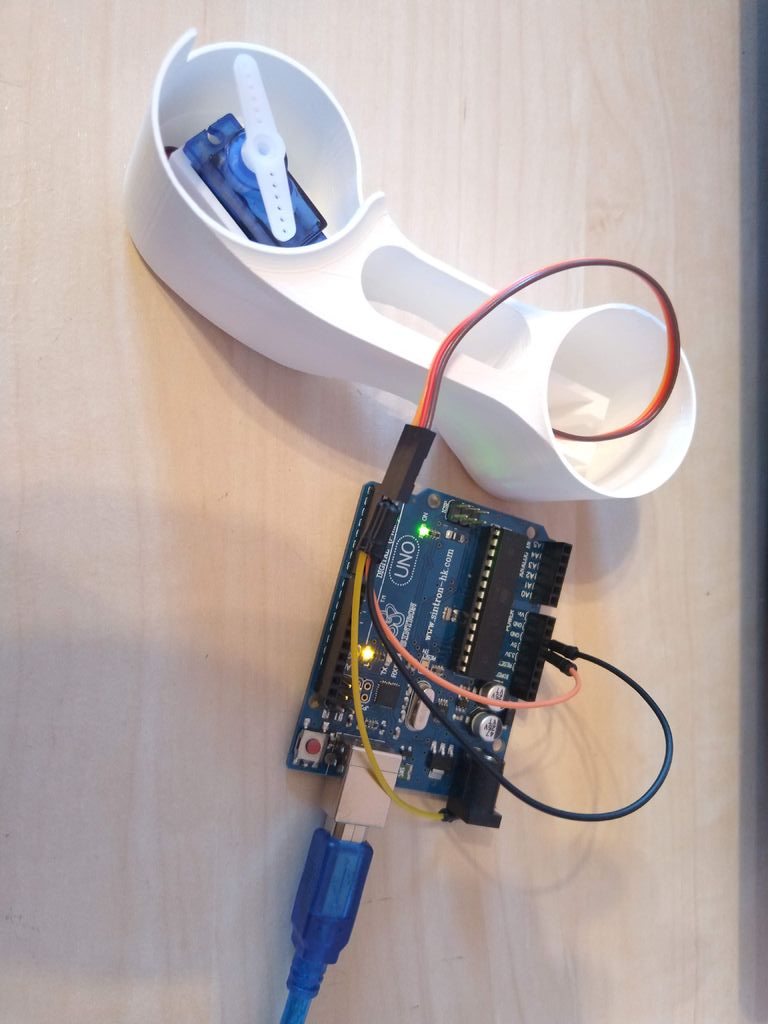
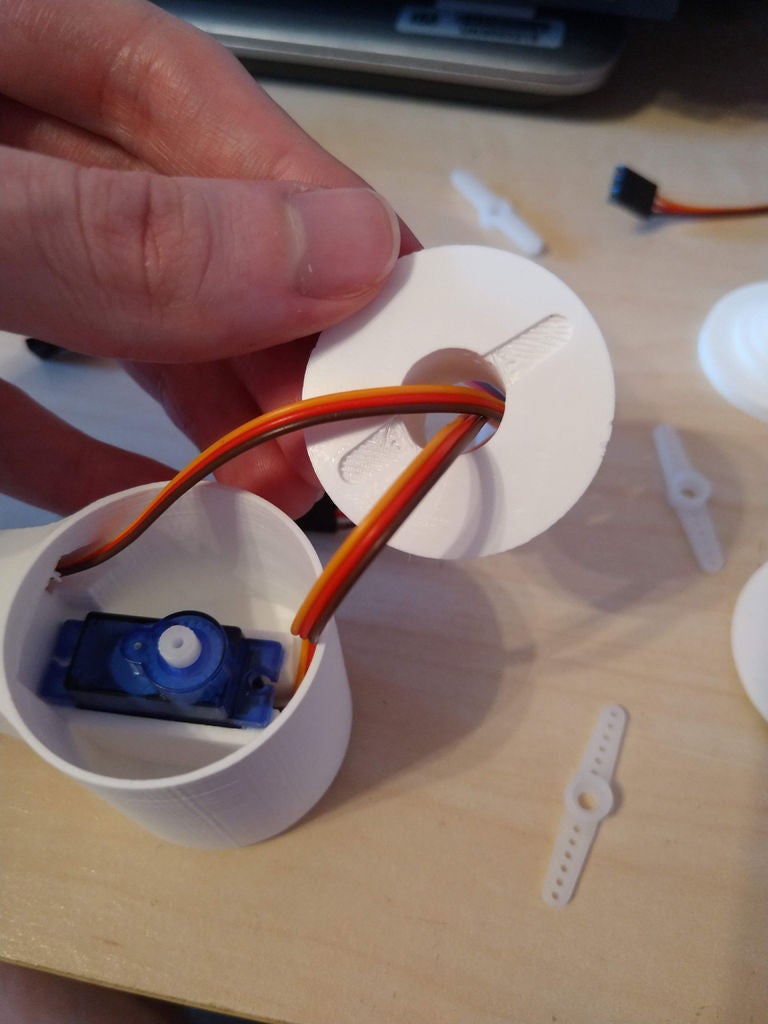
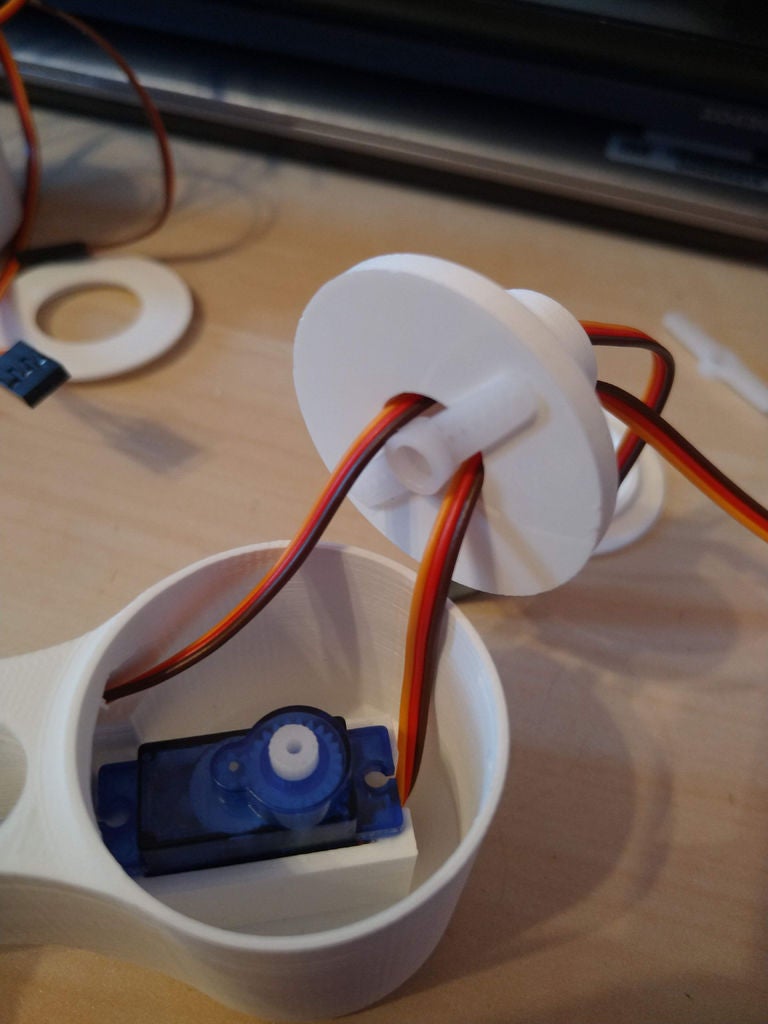
- Скрытые кабели - ноги робота используют по два серводвигателя, один в колене и один в плече. Чтобы скрыть все провода из поля зрения в этой конструкции, для этого в части бедра робота сделан небольшой канал, достаточный для укладки кабеля. В нужный момент необходимо приостановить работу принтера, проложил кабель через канал и возобновить печать. Таким образом полчиться, что кабель от сервопривода будет скрыт внутри детали.
- Усовершенствованная поддержка Meshmixer для сложных свесов. Это немного сложная часть программного обеспечения, но она может быть очень полезна для создания поддержек в виде дерева для деталей со сложными свесами. Мы будем применять эту технику несколько раз при печати деталей робота.
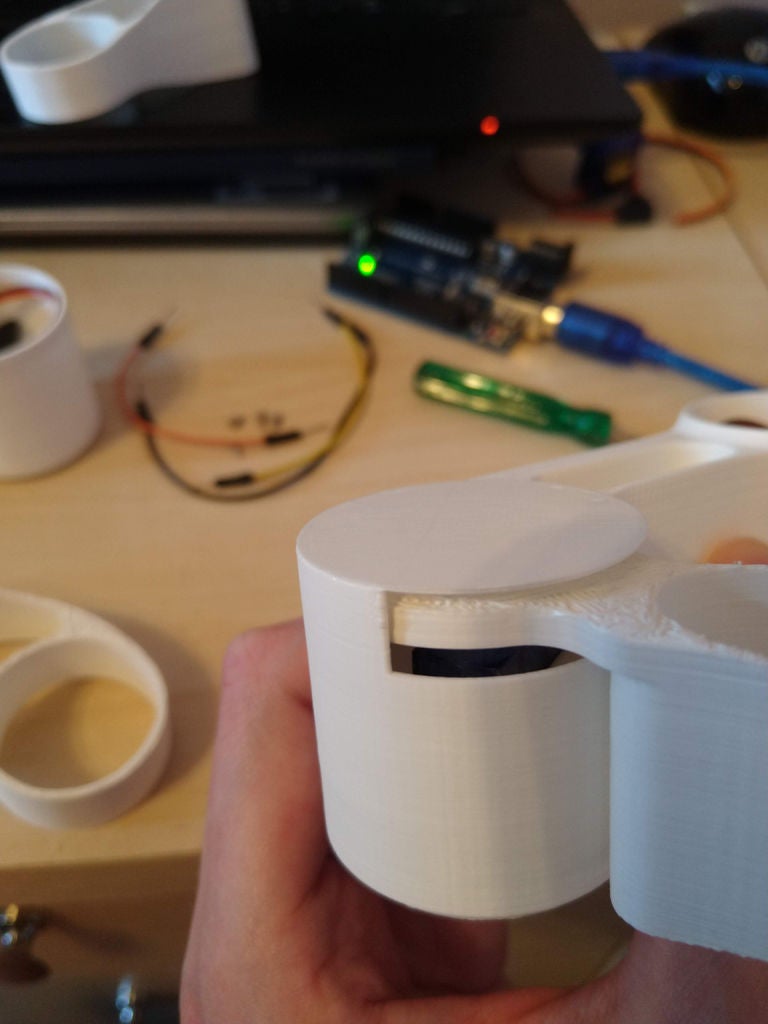
- Детали с фрикционным креплением - Многие детали в этой сборке не склеены, а просто рассчитаны на плотное трение между напечатаными деталями. Мы будем использовать эту технику для надежной и безопасной установки электроники в корпус, а также для возможности их снятия при необходимости.
- Встроенные шестигранные гайки для болтов - крышка корпуса закрывает весь отсек с электроникой и удерживается при помощи 8 болтов M2,5. Гайки для них вставляются в шестиугольные полости в корпусе и удерживаются на месте с помощью суперклея.
Основные компоненты:
- Arduino Uno (оригинал или дубликат)
- Adafruit Powerboost 1000C либо любое другое зарядно устройство для зарядки Li-Ion аккумуляторов
- Литий-ионный аккумулятор 18650
- Ультразвуковой модуль расстояния HC-SR04 2 шт
- Сервопривод Tower Pro 9g SG90 8шт (Towerpro SG90 или аналогичный)
- Фоторезистор (LDR) x 1
Дполнительные компоненты
- 5 мм светодиод х 2 (красный или другой цвет, на ваш выбор!)
- Макетная плата для пайки (25 х 60 мм)
- SPDT ползунковый переключатель (Один полюс, два направления.)
- Контактная панель для пайки
- Соединительные провода (тонкие, для подключения датчиков)
- Соединительные провода (толстые, для батареи и проводов питания)
- Держатель батареи 18650 (рекомендуется, не обязательно)
- Резистор 3 кОм x 2
- Резистор 470 Ом x 1
- М2,5 Гайки х 8
- M2,5x8 Болты х 8
- Термоусадочные трубки
- Электроизоляционная лента
Инструменты и оборудование:
- 3D-принтер, печатная область размером не менее 210 x 210 мм - см.
- Паяльник и припой
- Супер клей
- Вазелин (для смазывания "суставов" на ногах робота)
- Боковые фрезы
- Скальпель / ремесленный нож
- Наждачная бумага
- Зарядное устройство Micro USB (зарядное устройство от телефона подойдет)
- Arduino USB-кабель
- ПК / ноутбук для программирования робота, подготовки печати и т.д.
Програмное обеспечение:
- Сласер для 3Д печати (например Ultimaker Cura)
- Autodesk Meshmixer (для генерации расширенной поддержек )
- Программное обеспечение САПР (если вы хотите вносить изменения в САПР, я использую образовательную лицензию Creo Parametric. Tinkercad, Fusion 360, Autodesk Inventor - другие варианты САПР, используйте все, что вам удобно!)
- Arduino IDE
3D печать настройки
 |
 |
 |
 |
 |
|
 |
Meshmixer
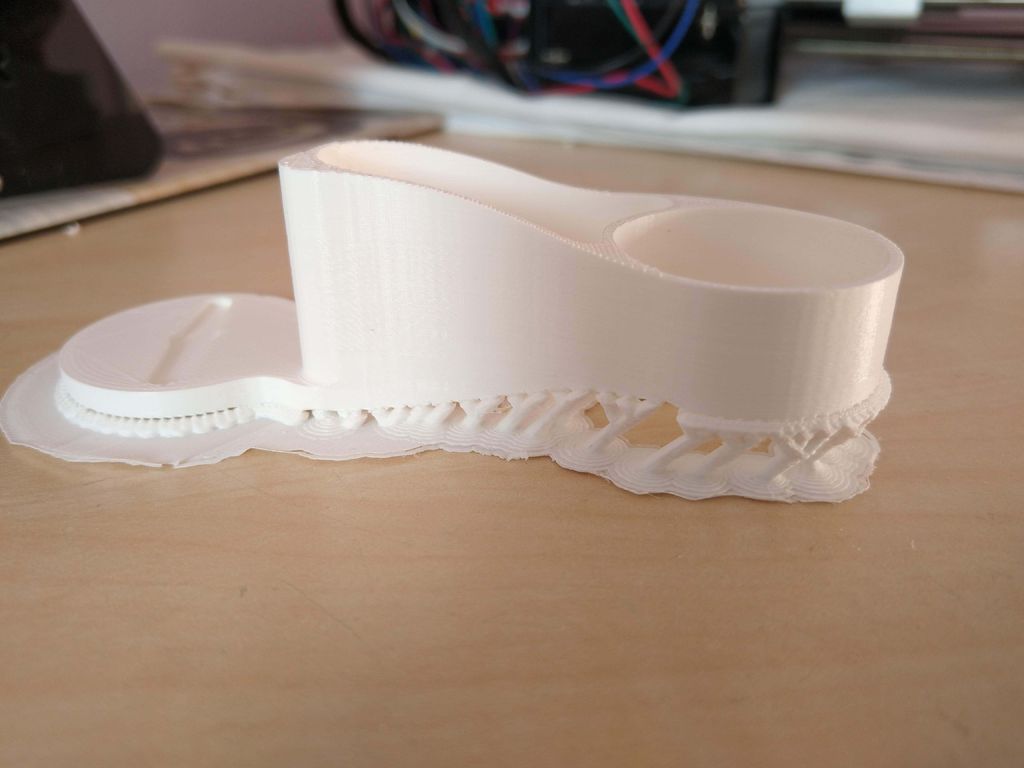
Первые два изображения показывают опоры (поддержку) типа смикширования, которые были использованы при печати частей «бедра» и «запястья», поскольку данный тип поддержки намного лучше, чем опоры базового типа. Третье изображение показывает настройки поддержек для нависающего края, которые использованы в Meshmixer.
Когда вы откроете Meshmixer, нажмите Import и выберите файл .stl нужной вам части. Затем выберите Edit на панели задач слева и Transform. Используйте это, чтобы изменить ориентацию вашего файла, и нажмите Accept. Затем выберите «Align» и «Accept». Это должно автоматически положить вашу деталь на печатную повержность. Не беспокойтесь, что печатная поверхность может не соответствовать вашему 3D-принтеру, я думаю, что Makerbot Replicator 2 используется по умолчанию, мы просто отредактируем файл .stl и снова экспортируем его, так что это не имеет значения. Теперь выберите Analysis на панели задач и Overhangs. Здесь измените, настройки так, чтобы они соответствовали тем приведенным на изображении. Нажмите [1] Generate Support, затем Done. Теперь все, что вам нужно сделать, это File и Export, и выбрать, где сохранить ваш новый файл .stl, который теперь будет содержать созданные поддержки.
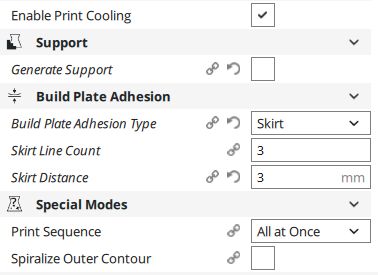
Слайсер Cura
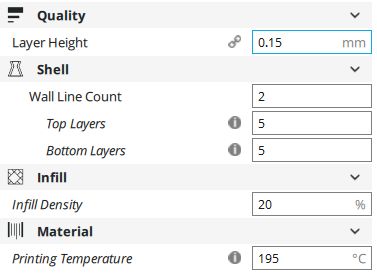
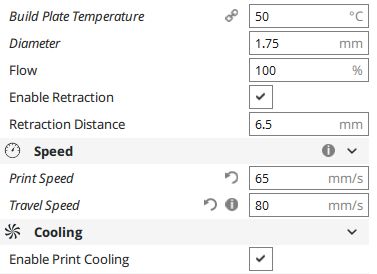
Для создания файлов печати будем использовать программу Cura, вы можете использовать свою программу с которой привыкли работать. Ниже приведено несколько скриншотов настроек печати, которые использовались для всех деталей собаки робота, чтобы вы могли видеть. Чтобы качество было макисмальное, печать шла очень медленно, а также использовалась относительно небольша высота слоя. Самыми важными для качества являются, разумеется, детали, относящиеся к суставам ног - детали, напечатанные на 3D, служат в качестве ступиц и осей, и это ключ к тому, чтобы они были максимально гладкими и точными в размерах.
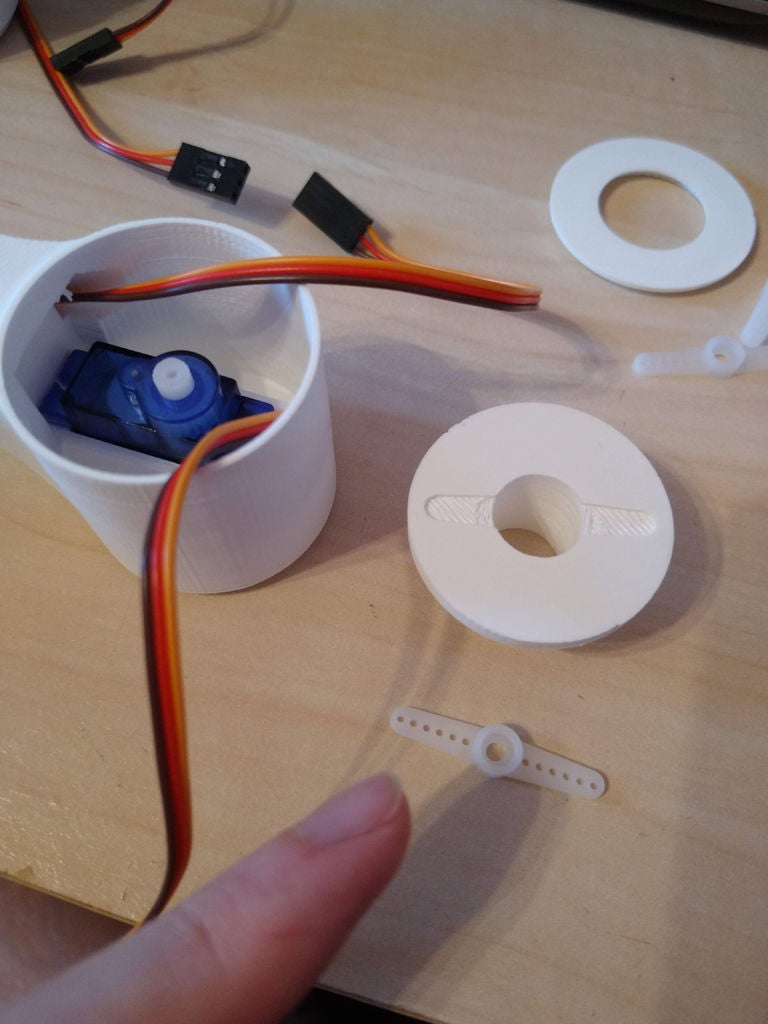
Процесс сборки ног
 |
 |
 |
 |
 |
 |
|
 |
 |
 |
 |
 |
 |
 |
 |
