

Сравнение ультразвуковых датчиков HC-SR04 и HY-SRF05
На первый взгляд, между этими двумя датчиками есть только небольшие технические различия (см. таблицу):
| HC-SR04 | HY-SRF05 | |
| Рабочее напряжение | 5 В постоянного тока | 5 В постоянного тока |
| Ток покоя | < 2мА | <2 мА |
| Выходной сигнал: | высокий уровень 5В, низкий уровень 0В | высокий уровень 5В, низкий уровень 0В |
| Угол распространения (эффективный угол) | < 15 градусов | < 15 градусов |
| Диапазон измеряемого расстояния | 2см-450см | 2см-450см |
| Разрешающая способность (точность) | ~3 мм | ~2 мм |
| Входной сигнал запуска: | 10мс TTL импульс | 10мс TTL импульс |
| Эхосигнал | выходной сигнал TTL PWL | выходной сигнал TTL PWL |
| Pins |
|
|
На первый взгляд, как видно из таблицы, разница не такая уж и большая.
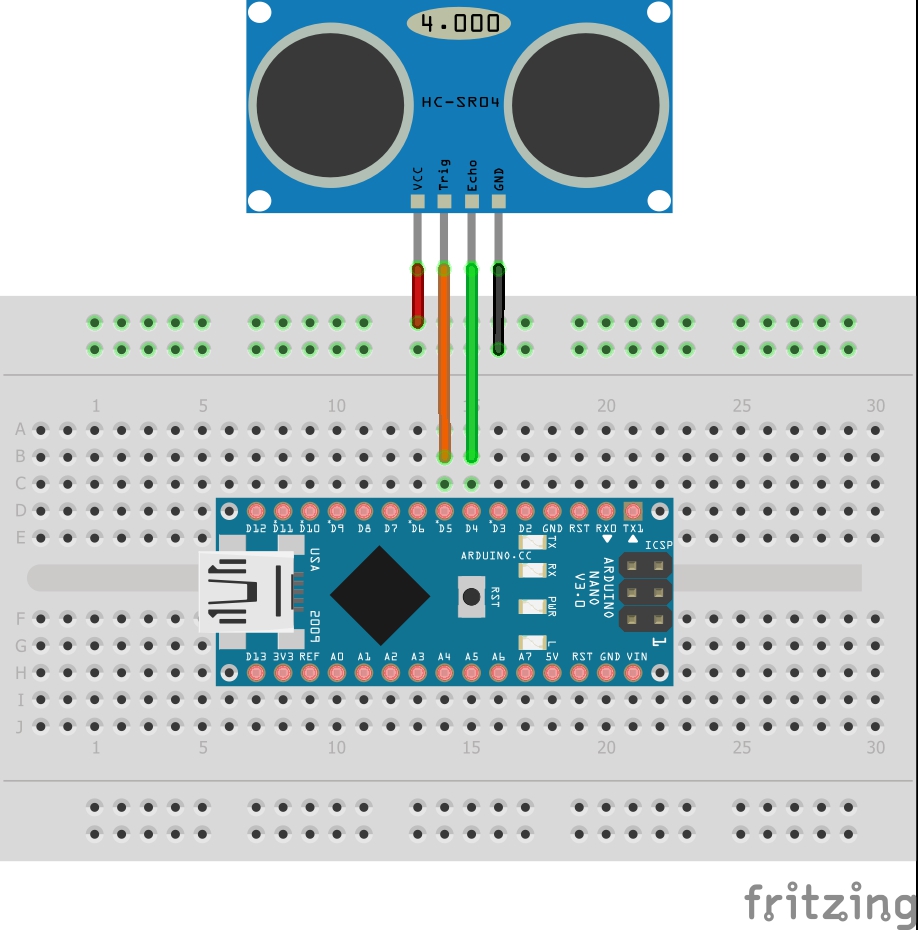
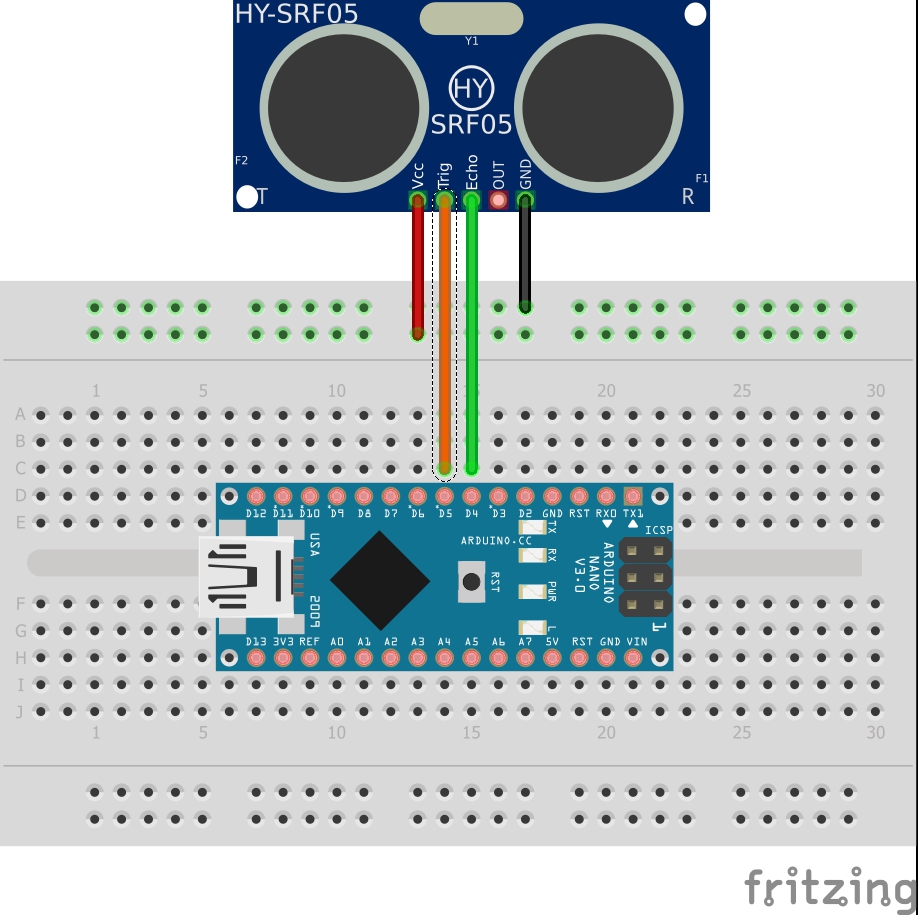
Теперь сравним возможные схемы подключения:
| HC-SR04 | HY-SRF05 |
 |
 |
Код для работы с датчиками HC-SR04 и HY-SRF05
#define PIN_TRIG 5
#define PIN_ECHO 4
long duration, cm;
void setup() {
// Инициализируем взаимодействие по последовательному порту
Serial.begin (9600);
//Определяем вводы и выводы
pinMode(PIN_TRIG, OUTPUT);
pinMode(PIN_ECHO, INPUT);
}
void loop() {
// Сначала генерируем короткий импульс длительностью 2-5 микросекунд.
digitalWrite(PIN_TRIG, LOW);
delayMicroseconds(5);
digitalWrite(PIN_TRIG, HIGH);
// Выставив высокий уровень сигнала, ждем около 10 микросекунд.
//В этот момент датчик будет посылать сигналы с частотой 40 КГц.
delayMicroseconds(10);
digitalWrite(PIN_TRIG, LOW);
// Время задержки акустического сигнала на эхолокаторе.
duration = pulseIn(PIN_ECHO, HIGH);
// Теперь осталось преобразовать время в расстояние
cm = (duration / 2) / 29.1;
Serial.print("Расстояние до объекта: ");
Serial.print(cm);
Serial.println(" см.");
// Задержка между измерениями для корректной работы скеча
delay(250);
}
